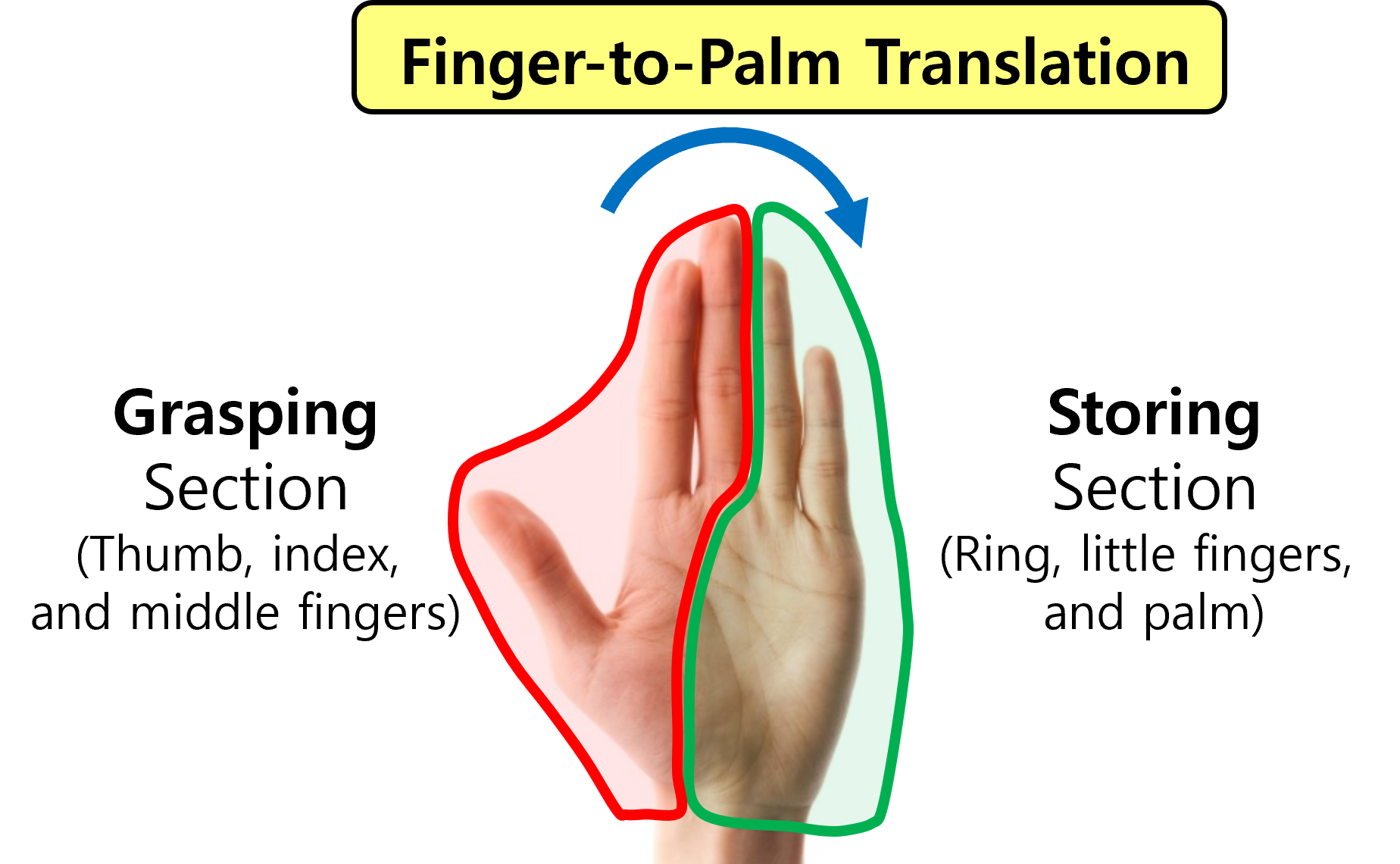
Humans use their dexterous fingers and adaptable palm to efficiently grasp and move multiple objects together, a process known as multi-object grasping. Among various manipulation skills, finger-to-palm translation plays a crucial role in multi-object grasping by enabling fingers to transfer grasped objects to the palm for temporary storage, freeing them for additional pick-and-place tasks. However, most robotic hand research has focused on grasping and manipulating single objects, limiting efficiency in multi-object handling. While some studies have explored multi-object grasping but often require human assistance or are restricted to clustered objects. Here, we propose the MOG Hand, a robotic hand designed for multi-object grasping that leverages finger-to-palm translation to synergistically utilize fingers and the palm for enhanced pick-and-place functionality. The proposed hand consists of two sections: the grasping section (thumb, index, and middle fingers) and the storing section (ring, little fingers, and palm). The grasping section grasps the object by flexing the fingers underneath it. As the fingers flex further, the grasped object slides along the inner surface of the fingers toward the palm, enabling finger-to-palm translation. The storing section provides stable storage for multiple objects. To enable this sequence, we analyze the required finger movements and optimize the fingers’ dimensions and joint stiffness. Furthermore, we validate the feasibility of the proposed hand through domestic demonstrations. Our work introduces finger-to-palm translation as a fundamental manipulation skill for multi-object grasping and presents a robotic hand design capable of performing this skill effectively.
Video
This video shows the research motivation and demonstration of developed robotic hand.
Grasp Strategies
Grasp Strategy I - Finger-to-Palm Translation via Object Sliding
Humans repeat the process of grasping → finger-to-palm translation → storing to gather multiple objects in the palm before transporting them. The target objects were set as column-shaped, as they are one of the most frequently handled objects in daily life [1]. To efficiently transfer a column-shaped object to the palm, humans slide the grasped object along the inner surface of their fingers. Since this method does not require additional motions such as wrist flipping, it is considered the most effective approach for translating column-shaped objects. Thus, sliding-based finger-to-palm translation was established as the key manipulation skill for the MOG Hand.
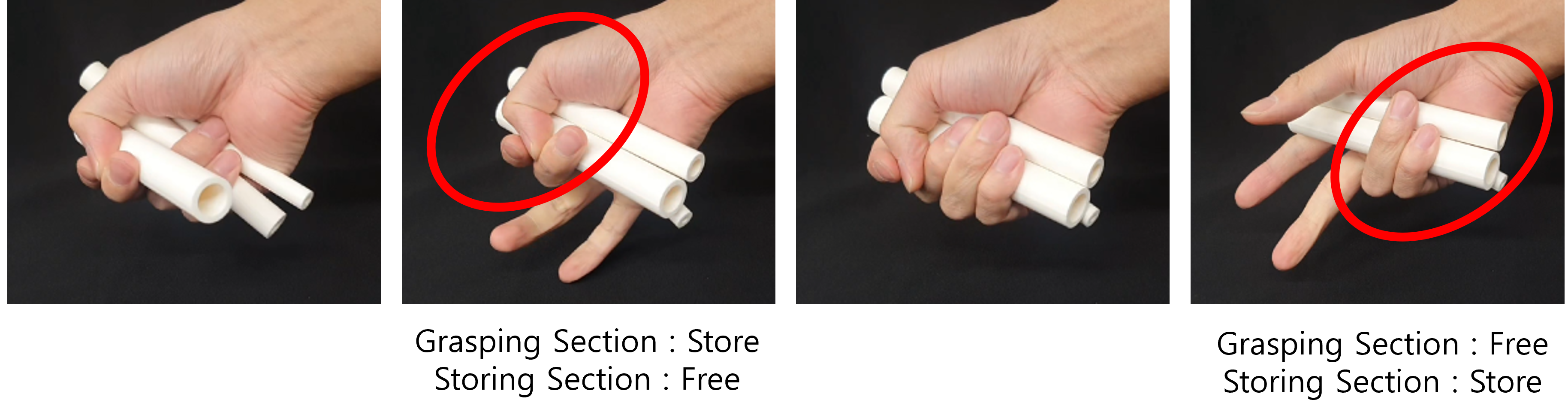
Grasp Strategy II - Switching Strategy
If the hand is already storing objects, it needs to open and close the storing section to accommodate a new object. To ensure a stable storage on the objects even when the storing section is open, the grasping section temporarily holds them. We refer to this strategy as the switching strategy.
📌 Reference
[1] Feix, Thomas, Ian M. Bullock, and Aaron M. Dollar. “Analysis of human grasping behavior: Object characteristics and grasp type.” IEEE Transactions on Haptics 7.3 (2014): 311-323.